Visual Evidence
The Difference Is
Visible at First Glance
Commercial Methodology — GSD ~5 cm/px (M3T @ ~38 m), misaligned flight
 RGB — High altitude, misaligned
RGB — High altitude, misaligned
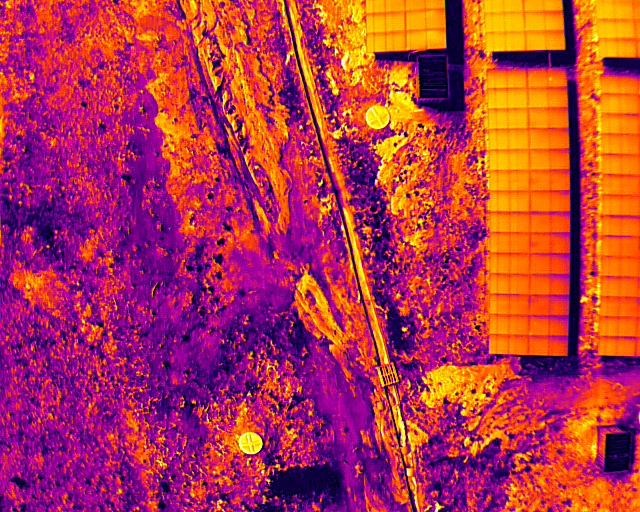 Thermal — Mostly empty terrain
Thermal — Mostly empty terrain
Kira Methodology — GSD 2.3 cm/px (M3T @ 17 m), string-aligned flight
 RGB — Every cell individually resolved
RGB — Every cell individually resolved
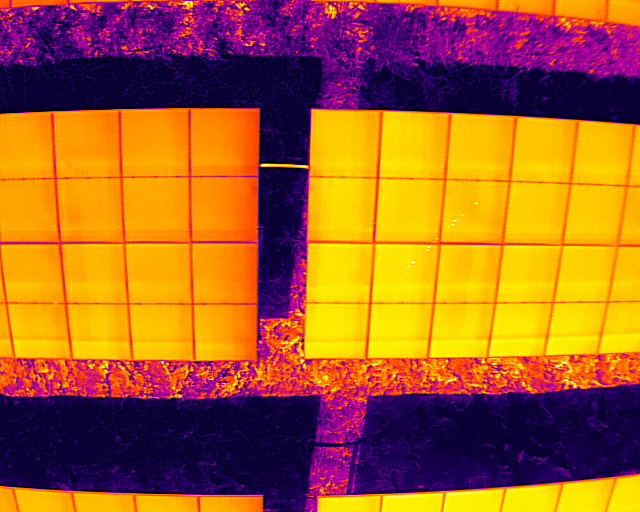 Thermal — Hotspot clearly measurable
Thermal — Hotspot clearly measurable
End-to-End Traceability: Module → RGB → Thermal → Ortho
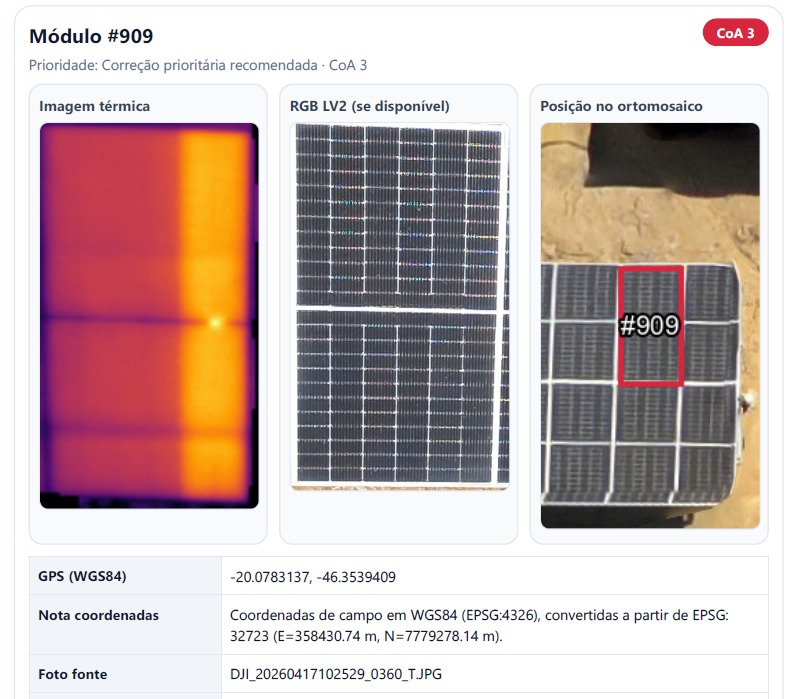
Module #909 — Thermal anomaly (left), high-res RGB crop (center), orthomosaic position with bounding box and GPS (right). Everything linked. Everything traceable. CoA 3 classification.